CS684: Embedded System Course
Lab 5: Final Project Implementation
Aim
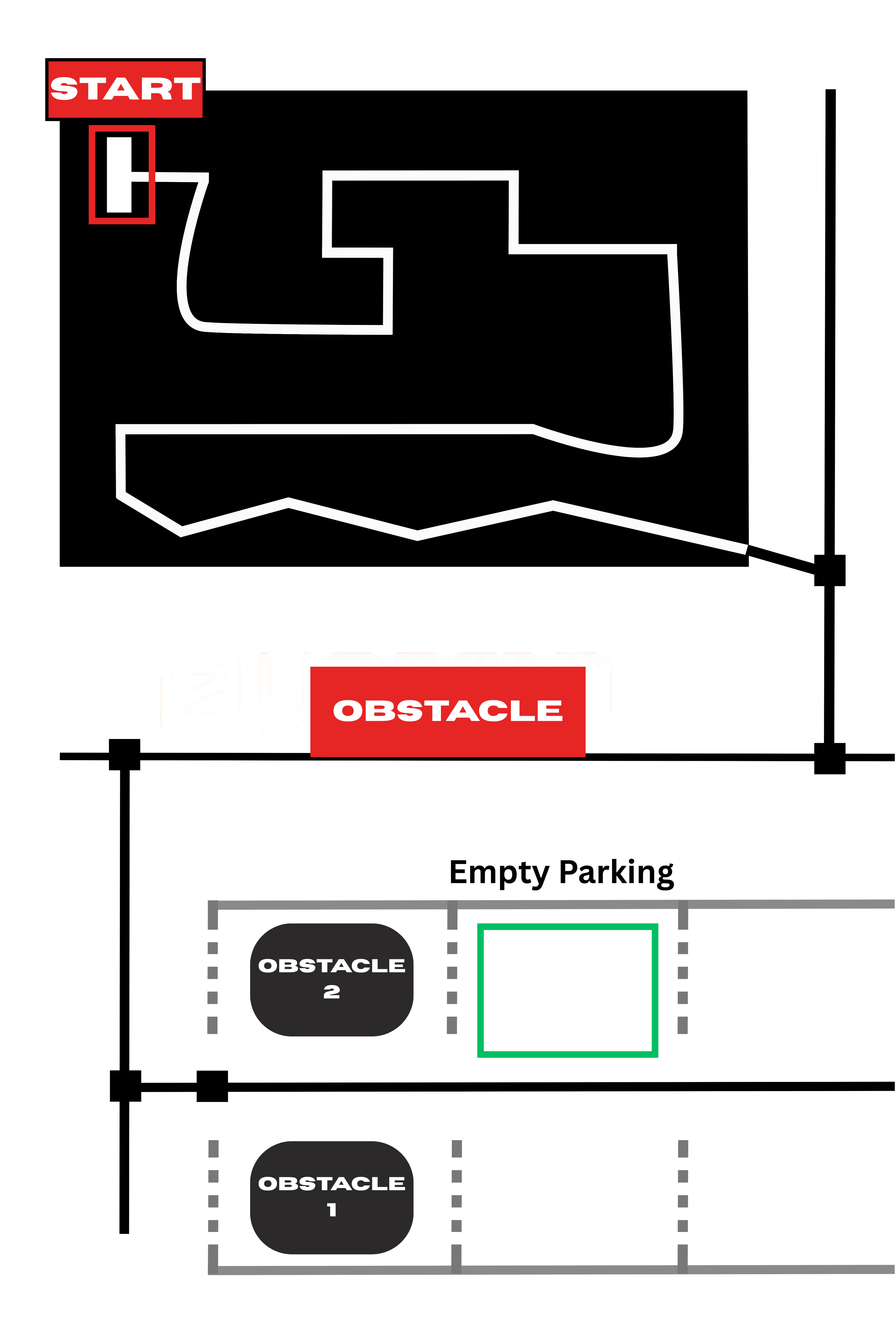
This lab builds upon your Lab 4, the robot should park itself from the start point to an empty parking location using Line Following, Obstacle Navigation as well as Obstacle Avoidance algorithm.
-
Line FollowingandObstacle Navigation: You have already developed the line following algorithm along with line switching and obstacle navigation. -
Obstacle Avoidance: While the robot is trying to park itself, it has to find empty parking slot. The obstacles will be placed at certain parking locations which will be considerd as reserved parking slots.
Placement of obstacle for reserved parking slot:
We will be giving each team 6 thermocol blocks of dimensions 5x5x5 which will be acting as osbtacles for 2 parking slots. For one parking slot you are allowed to place max 3 blocks, how to place, is as per your strategy.
For reserved slot refer above arena image.
Video Instructions:
- Setup the arena accoridng to given image.
- Show the code while explaining following parts:
- White Line Following
- Line Switching
- Black Line Following
- Obstacle Navigation
- Parking
- Run the
integrate.shscript and upload the same code in the robot. - Keep the robot at the start loaction. Turn on the robot. Robot should properly navigate through the arena.
- Once the robot parks itself in an empty parking slot it will be considered as end of the run.
Note: Video should be continous, without any cuts and should not be fast forwarded. Make sure the code at the start is visible properly othwerise respective marks would be deducted.
Scoring Criteria
The team’s score is calculated based on the following formula:
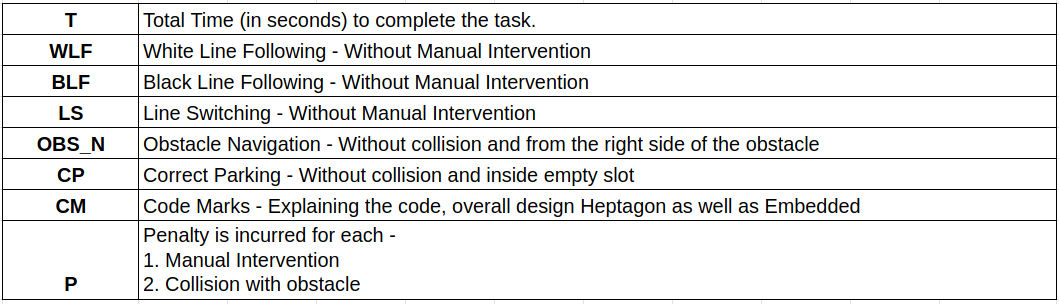
TotalScore = (300 − T) + (WLF x 50) + (BLF x 50) + (LS x 60) + (OBS_N x 40) + (CP x 50) + (CM x 150) - (P x 20)
where, Parameter and Definition for same are given in image below:
Submission Instructions
- For Lab-5 submission you have to upload a
.tar.gzfile.Heptagon Projectfolder: It should contain followingHeptagonFolder: Containing the heptagon implementation of the logic.Integrate.shfile: to generate the c files from heptagon.SupervisorFolder: it containssupervisor.inofile and auto generated c files from the heptagon.
Readme.txtfile:- Youtube link of the video - as per the instructions given in Video Instructions.
-
Note: If your video is not as per the Video Instructions given above, your submission will not be evaluted.
Contribution.txtfile: stating detailed contribution of each member
- Compress the folder and rename it as
<GroupName>_Lab_5.tar.gz(check your file, it shouldn't be empty) - Upload the file on Moodle
- There should be only one submission per group. Member having highest roll no should do the submission.